株式会社テムザック(京都府京都市)が、中山間農地における稲作を省力化するための収穫ロボット・多用途ロボットを開発したと発表しました。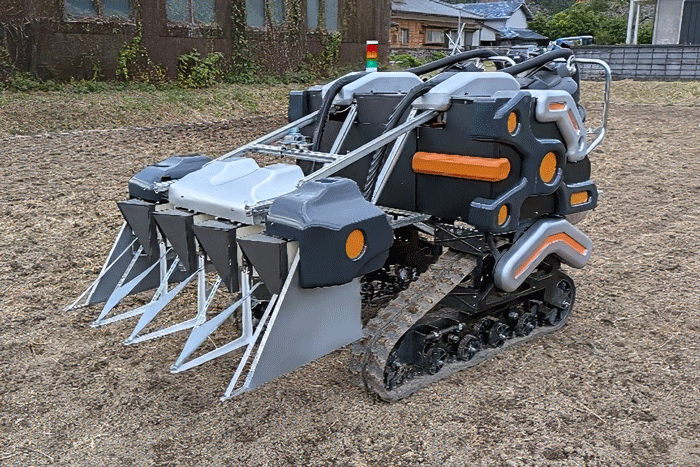 収穫ロボット “RMD-0” は、小型・電動・非搭乗で軽トラックに積載可能なサイズ・重量。
収穫ロボット “RMD-0” は、小型・電動・非搭乗で軽トラックに積載可能なサイズ・重量。
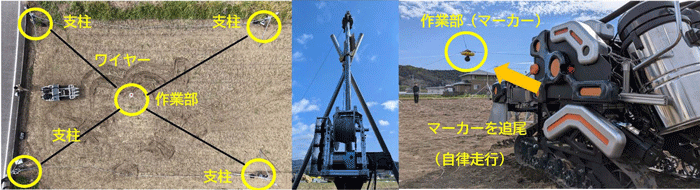
別途開発された多用途ロボット “MU-0″(※)のマーカーを追尾することで、自律走行が可能となっています。
※圃場の四隅から張り出したワイヤーが伸縮し、交点部の装置を移動させることで、作業を実施・支援します。今回は、他のロボットの自律移動を支援するマーカー機能や、害獣を追払う機能が搭載されています。
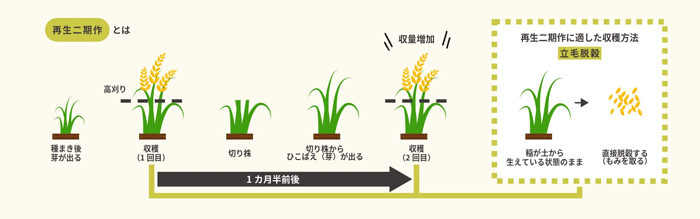
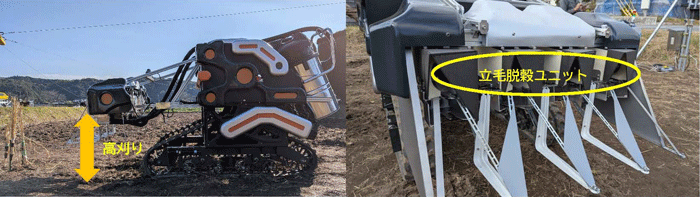
収穫ロボット “RMD-0” は、1シーズンに2度収穫する “再生二期作” への対応として、高刈りや立毛脱穀を行えます。
また、テムザックが取り組む省力化稲作支援サービスの実証プロジェクト(※)は、総務省事業に採択されています。
※ロボット遠隔管制センター、先進無線技術の活用による映像伝送環境、AIによる圃場内リスクの自動検知などの機能を開発し、省力化稲作を総合的に実証検証する試み
今回発表されたロボットは、こちらの実証実験でも活用されています。









